Magnitude of torque in terms of lever arm (8-19)
Question 1 of 3
Question
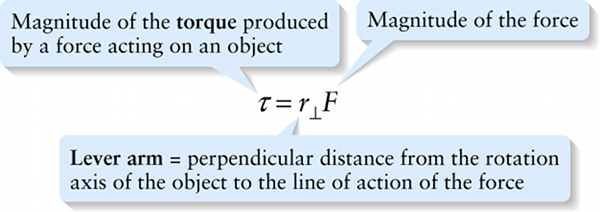
Lever arm= perpendicular distance from the rotation axis of the object to the line of action of the force
{"title":"Magnitude of the torque produced by a force acting on an object","description":"Incorrect","type":"incorrect","color":"#99CCFF","code":"[{\"shape\":\"poly\",\"coords\":\"82,133\"},{\"shape\":\"rect\",\"coords\":\"4,19,40,53\"}]"} {"title":"Magnitude of the force","description":"Wrong","type":"incorrect","color":"#ffcc00","code":"[{\"shape\":\"rect\",\"coords\":\"118,11,119,13\"},{\"shape\":\"rect\",\"coords\":\"139,8,174,53\"}]"} {"title":"Lever arm = perpendicular distance from the rotation axis of the object to the line of action of the force","description":"Correct!","type":"correct","color":"#333300","code":"[{\"shape\":\"rect\",\"coords\":\"83,12,119,57\"}]"}
Review
Figure 8-19c shows another way to calculate the magnitude of the torque for the situation in Figure 8-19a. As this figure shows, the line of action of the force is just an extension of the force vector →F through the point where the force is applied. The lever arm of the force (also called the moment arm) is the perpendicular distance from the rotation axis to the line of action of the force, which is why we denote it by the symbol r⊥ (⊥ is mathematical shorthand for “perpendicular”). Trigonometry shows that the lever arm r⊥ equals rsinϕ, the same quantity that appears in Equation 8-18. Hence we can rewrite that equation as: