Learning
Who do you think learned more today—you or a 10–month–old infant? We'd bet on the baby, just because there is so much that is new to an infant. Think back to baby Benjamin in the kitchen with his parents. A wealth of learning opportunities was embedded in that everyday scene. Benjamin was, for example, gaining experience with some of the differences between animate and inanimate entities, with the particular sights and sounds that occur together in events, with the consequences of objects' losing support (including the effect of this event on his parents' emotional state), and so on. He also experienced consequences of his own behavior, such as his parents' response to his crying.
In this section, we review seven different types of learning by which infants profit from their experience and acquire knowledge of the world. Some of the questions that developmental psychologists have addressed with respect to infants' learning include at what age the different forms of learning appear and in what ways learning in infancy is related to later cognitive abilities. Another important question concerns the extent to which infants find some things easier or more difficult to learn. The learning abilities described below are implicated in developmental achievements across every domain of human functioning, from visual perception to social skills. It is thus impossible to think about development without considering the nature of the learning mechanisms that support developmental change.
199
Habituation

The simplest form of learning is recognizing something that has been experienced before. As we discussed in Chapter 2 and again earlier in this chapter, babies—like everybody else—tend to respond relatively less to stimuli they have previously experienced, and relatively more to novel stimuli (see Figure 5.13). The occurrence of habituation in response to repeated stimulation reveals that learning has taken place; the infant has formed a memory representation of the repeated, and now familiar, stimulus. Habituation is highly adaptive: diminished attention to what is familiar enables infants to pay attention to, and learn about, what is new.
The speed with which an infant habituates is believed to reflect the general efficiency of the infant's processing of information. Related measures of attention, including duration of looking and degree of novelty preference, also indicate speed and efficiency of processing. A substantial and surprising degree of continuity has been found between these measures in infancy and general cognitive ability later in life. Infants who habituate relatively rapidly, who take relatively short looks at visual stimuli, and/or who show a greater preference for novelty tend to have higher IQs when tested as much as 18 years later (Colombo et al., 2004; Rose & Feldman, 1997). Thus, habituation, one of the earliest and simplest forms of human learning, is fundamental to basic cognitive development.
Perceptual Learning
From their first moments of life, infants actively search for order and regularity in the world around them, and they learn a great deal from simply paying close attention to the objects and events they perceive. According to Eleanor Gibson (1988), the key process in perceptual learning is differentiation—extracting from the events in the environment the relation between those elements that are constant. For example, infants learn the association between tone of voice and facial expression because, in their experience, a pleasant, happy, or eagerly excited tone of voice occurs with a smiling face—not a frowning one—and a harsh, angry tone of voice occurs with a frowning face—not a smiling one.

A particularly important part of perceptual learning is the infant's discovery of affordances—that is, the possibilities for action offered, or afforded, by objects and situations (Gibson, 1988). They discover, for example, that small objects—but not large ones—afford the possibility of being picked up, that liquid affords the possibility of being poured and spilled, that chairs of a certain size afford the possibility of being sat on, and so forth. Infants discover affordances by figuring out the relations between their own bodies and abilities and the things around them. As we discussed earlier, for example, infants learn that solid, flat surfaces afford stable walking, whereas squishy, slick, or steeply sloping ones do not (e.g., Adolph, 2008).
200
Perceptual learning underlies the development of some, but not all, aspects of intermodal perception. As we noted previously, learning is not required to detect an event involving sight and sound as unitary; thus, baby Benjamin naturally perceives a single, coherent event the first time he sees and hears a crystal goblet crashing on the floor. However, one does have to learn what particular sights and sounds go together, so only through experience does Ben know that a particular tinkling sound means a glass is being broken. As you have seen, young infants are sensitive early on to the synchrony of lip movements and vocal sounds, but they have to learn to relate the unique sight of their mother's face with the unique sound of her voice, which they accomplish by 3½ months of age (Spelke & Owsley, 1979). The necessity for perceptual learning is especially clear with regard to events that involve arbitrary relations, such as an association between the color of a cup and the taste of the food inside. The fact that 7–month–olds can be taught color–;taste associations in the lab (Reardon & Bushnell, 1988) would come as no surprise to those parents whose infants clamp their mouths shut at the sight of a spoon conveying anything green.
Statistical Learning
A related type of learning also involves simply picking up information from the environment, specifically, detecting statistically predictable patterns (Aslin, Saffran, & Newport, 1998; Kirkham, Slemmer, & Johnson, 2002; Saffran, Aslin, & Newport, 1996). Our natural environment contains a high degree of regularity and redundancy; certain events occur in a predictable order, certain objects appear at the same time and place, and so on. A common example for a baby is the regularity with which the sound of Mom's voice is followed by the appearance of her face.
From quite early on, infants are highly sensitive to the regularity with which one event follows another. In one study, 2– to 8–month–olds were habituated to six simple visual shapes that were presented one after another with specified levels of probability (Kirkham et al., 2002). For example, three pairs of colored shapes always occurred together in the same order (e.g., a square was always followed by a cross), but the next stimulus could be any of three different shapes (e.g., a cross was followed by a circle, triangle, or square equally often). Thus, the probability that the cross would follow the square was 100%, but the probability that the circle (or triangle or square) would follow the cross was 33%. In a test, the order of appearance of one or more of the shapes was changed. The infants looked longer when the structure inherent in the initial set was violated (e.g., square followed by circle).
Statistical learning abilities have been measured across numerous domains, including music, action, and speech (Roseberry et al., 2011; Saffran & Griepentrog, 2001; Saffran et al., 1996). Even newborn infants track statistical regularities in these domains, suggesting that statistical learning mechanisms are available at birth if not before (Bulf, Johnson, & Valenza, 2011; Kudo et al., 2011; Teinonen et al., 2009). Finally, statistical learning has been proposed to be of vital importance in language learning, as we will discuss in Chapter 6.
201
Several recent studies suggest that infants prefer to attend to certain types of statistical patterns over others. In particular, they appear to prefer patterns that have some variability over patterns that are very simple (perfectly predictable) or very complex (random) (Gerken, Balcomb, & Minton, 2011; Kidd et al., 2012). This “Goldilocks effect”—avoiding patterns that are either too easy or too hard, while continuing to focus on those that are just right, given the infant's learning abilities—suggests that infants allocate attention differently to different learning problems, preferentially attending to those patterns that are the most informative.
Classical Conditioning
Another type of learning, classical conditioning, was first discovered by Ivan Pavlov in his famous research with dogs (who learned an association between the sound of a bell and the arrival of food and gradually came to salivate at the sound of the bell alone). Classical conditioning plays a role in infants' everyday learning about the relations between environmental events that have relevance for them. Consider young babies' mealtimes, which occur frequently and have a predictable structure. A breast or bottle contacts the infant's mouth, eliciting the sucking reflex. The sucking causes milk to flow into the infant's mouth, and the infant experiences the pleasurable sensations of a delicious taste and the satisfaction of hunger. Learning is revealed when an infant's sucking motions begin to occur at the mere sight of the bottle or breast.
In terms of classical conditioning, the nipple in the infant's mouth is an unconditioned stimulus (UCS) that reliably elicits a reflexive, unlearned response—in this case, the sucking reflex—the unconditioned response (UCR). Learning, or conditioning, occurs when an initially neutral stimulus—the breast or bottle, which is the conditioned stimulus (CS)—repeatedly occurs just before the unconditioned stimulus (the baby sees the breast or bottle before receiving the nipple). Gradually, the originally reflexive response becomes a learned behavior, or conditioned response (CR), triggered by exposure to the CS (anticipatory sucking movements now begin as soon as the baby sees the breast or bottle). In other words, the sight of the bottle or breast has become a signal of what will follow. Gradually, the infant may also come to associate caregivers with the entire sequence, including the pleasurable feelings that result from feeding. If so, these feelings could eventually be evoked simply by the presence of a caregiver. It is thought that many emotional responses are initially learned through classical conditioning.
Instrumental Conditioning
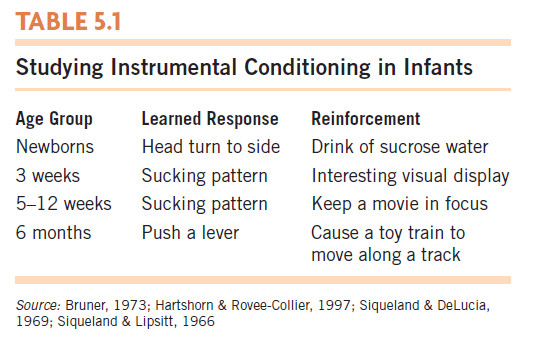
A key form of learning for infants (and everyone else) is learning the consequences of one's own behavior. In everyday life, infants learn that shaking a rattle produces an interesting sound, that cooing at Dad gets him to coo back, and that exploring the dirt in a potted plant leads to a parental reprimand. This kind of learning, referred to as instrumental conditioning (or operant conditioning), involves learning the relationship between one's own behavior and the reward or punishment it results in. Most research on instrumental conditioning in infants involves positive reinforcement, that is, a reward that reliably follows a behavior and increases the likelihood that the behavior will be repeated. Such research features a contingency relation between the infant's behavior and the reward: if the infant makes the target response, then he or she receives the reinforcement. Table 5.1 shows a few examples of the great variety of ingenious situations that researchers have engineered in order to examine instrumental learning in infants.
202
Carolyn Rovee–Collier (1997) developed an instrumental–conditioning procedure for studying learning and memory in young infants. In this method, experimenters tie a ribbon around a baby's ankle and connect it to a mobile hanging above the infant's crib (Figure 5.14). In the course of naturally kicking their legs, infants as young as 2 months of age quickly learn the relation between their leg movements and the enjoyable sight of the jiggling mobile. They then quite deliberately and often joyfully increase their rate of foot kicking. The interesting mobile movement thus serves as reinforcement for the kicking. An additional feature of this procedure is that the intensity of the reward—the amount of movement of the mobile—depends on the intensity of the baby's behavior. This task has been used extensively to investigate age–related changes in how long, and under what circumstances, infants continue to remember that kicking will activate the mobile (e.g., Rovee–Collier, 1999). Among the findings: (1) 3–month–olds remember the kicking response for about 1 week, whereas 6–month–olds remember it for 2 weeks; (2) infants younger than about 6 months of age remember the kicking response only when the test mobile is identical to the training mobile, whereas older infants remember it with novel mobiles.

Infants' intense motivation to explore and master their environment, which we have emphasized in our active child theme, shows up in instrumental–learning situations: infants work hard at learning to predict and control their experience, and once control has been established, they dislike losing it. Infants as young as 2 months old display facial expressions of joy and interest while learning a contingency relation, and display expressions of anger when a learned response no longer produces the expected results (Lewis, Alessandri, & Sullivan, 1990; Sullivan, Lewis, & Alessandri, 1992). In one study, for example, seven out of eight newborns cried when they failed to receive the sweet liquid they had learned would follow a head–turn response (Blass, 1990).
Infants may also learn that there are situations over which they have no control. For example, infants of depressed mothers tend to smile less and show lower levels of positive affect than do infants whose mothers are not depressed. In part, this may be because infants of depressed mothers learn that their smiling is rarely rewarded by their preoccupied parent (Campbell, Cohn, & Meyers, 1995). More generally, through contingency situations, whether in a lab or an everyday setting, infants learn more than just the particular contingency relations to which they are exposed. They also learn about the relation between themselves and the world and the extent to which they can have an impact on it.
Observational Learning/Imitation
A particularly potent source of infants' learning is their observation of other people's behaviors. Parents, who are often amused and sometimes embarrassed by their toddler's reproduction of their own behavior, are well aware that their offspring learn a great deal through simple observation.
203
The ability to imitate the behavior of other people appears to be present very early in life, albeit in an extremely limited form. Meltzoff and Moore (1977, 1983) found that after newborns watch an adult model slowly and repeatedly stick out his or her tongue, they often stick out their own tongue. By the age of 6 months, infant imitation is quite robust. Six–month–old infants not only imitate tongue protrusion, but they also attempt to poke their tongue out to the side when that is what they have seen an adult do (Meltzoff & Moore, 1994). From this age on, the scope of infant imitation expands. Infants begin to imitate novel, and sometimes quite strange, actions they have seen performed on objects. In one such study, infants observed an experimenter performing unusual behaviors with objects, such as leaning over from the waist to touch his or her forehead to a box, causing the box to light up. The infants were later presented with the same objects the experimenter had acted on. Infants as young as 6 to 9 months imitated some of the novel actions they witnessed, even after a delay of 24 hours (Barr, Dowden, & Hayne, 1996; Bauer, 2002; Hayne, Barr, & Herbert, 2003; Meltzoff, 1988b). Fourteen–month–olds imitated such actions a full week after first seeing them (Meltzoff, 1988a).
In choosing to imitate a model, infants seem to analyze the reason for the person's behavior. If infants see a model lean over and touch a box with her forehead, they later do the same. If, however, the model remarks that she's cold and tightly clutches a shawl around her body as she leans over and touches a box with her forehead, infants reach out and touch the box with their hand instead of their head (Gergely, Bekkering, & Kiraly, 2002). They apparently reason that the model wanted to touch the box and would have done so in a standard way if her hands had been free. Their imitation is thus based on their analysis of the person's intentions. In general, infants are flexible in learning through imitation: as in the case of touching the box, they can copy either the specific behavior through which a model achieves a goal, or they can employ different behaviors to achieve the same goal the model achieved (Buttelmann et al., 2008).
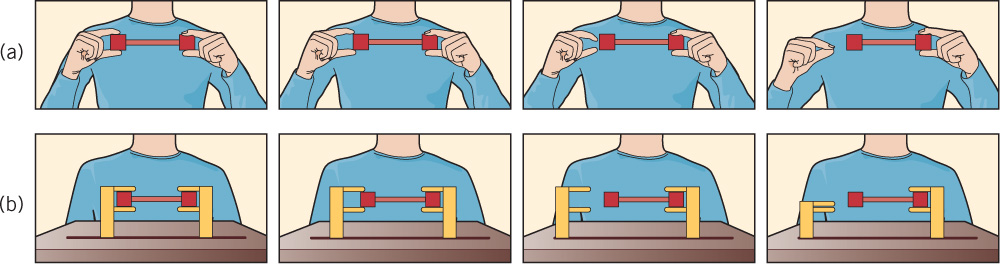
Further evidence of infants' attention to intention comes from research in which 18–month–olds observed an adult attempting, but failing, to pull apart a small dumbbell toy (Meltzoff, 1995a). The adult pulled on the two ends, but his hand “slipped off,” and the dumbbell remained in one piece (Figure 5.15a). When the infants were subsequently given the toy, they pulled the two ends apart, imitating what the adult had intended to do, not what he had actually done. This research also established that infants' imitative actions are limited to human acts. A different group of 18–month–olds watched a mechanical device with pincers grasp the two ends of the dumbbell. The pincers either pulled apart the dumbbell or slipped off the ends (Figure 5.15b). Regardless of what the infants had seen the mechanical device do, they rarely attempted to pull apart the dumbbell themselves. Thus, infants attempt to reproduce the behavior and intentions of other people, but not of inanimate objects.
204
Babies are by no means restricted to learning from the behavior of live adult models. Infants as young as 15 months of age imitate actions they have seen an adult perform on a video screen (Barr & Hayne, 1999; Meltzoff, 1988a). Peers can also serve as models for young toddlers, as demonstrated by a study in which well–trained 14–month–old “expert peers” performed novel actions (e.g., pushing a button hidden inside a box to sound a buzzer) for their age–mates, either at their preschool or in a laboratory (Hanna & Meltzoff, 1993). When the observer children were tested in their own homes 48 hours later, they imitated what they had seen the child model do earlier.
Current research is focused on the neural underpinnings of imitative learning. One area that has received a good deal of attention as a potential locus for imitation involves the so–called mirror neuron system, which was first identified in the ventral premotor cortex in nonhuman primates (e.g., Gallese et al., 1996; Rizzolatti & Craighero, 2004). In research with macaque monkeys, this system becomes activated when the monkey engages in an action; it also is activated when the macaque merely observes another monkey (or a human) engage in an action, as though the macaque itself were engaging in the same action—hence, the name “mirror” neuron system. (Mirror neurons were discovered when neuroscientists who were monitoring the brain activity of a monkey noticed that when the monkey happened to see a lab assistant raising an ice cream cone to his mouth, neurons in the monkey's premotor cortex began firing as though the monkey were about to eat the ice cream cone.)
The degree to which the same system is present in humans, as well as what behavioral domains it might affect, if any at all, is an area of hot debate. Researchers have, however, begun to discover patterns of infant brain activity that are consistent with the hypothesis that mirror neurons are present—namely, patterns of neural firing when infants are observing an action that is similar to those they display when they are performing the same action (Marshall & Meltzoff, 2011). Future studies using neuroscientific techniques should be informative about the roots of imitation, identifying what infants are actually encoding as they observe the actions of others, and how that perceptual information is transformed into self–action.
Rational Learning
As adults, we have many beliefs about the world, and we are usually surprised when the world violates our expectations based on those beliefs. We can then adjust our expectations based on the new information we have just received. For example, you can infer from prior meals at your favorite Chinese restaurant that it will be serving Chinese food the next time you go there, and your expectations would be violated if the restaurant turned out to be serving Mexican food on your next visit. You would then, however, update your expectations about the nature of the cuisine at this establishment. Indeed, scientific reasoning is based on precisely this sort of inference from prior data—for example, using data drawn from a sample of a particular population to make predictions about that population. Infants, too, can use prior experience to generate expectations about what will happen next. This is called rational learning because it involves integrating the learner's prior beliefs and biases with what actually occurs in the environment (Xu & Kushnir, 2013).
In an elegant study, Xu & Garcia (2008) demonstrated that 8–month–olds could make predictions about simple events. Infants were shown a box containing 75 ping–pong balls; 70 were red and 5 were white. The infants then observed an experimenter close her eyes (to suggest a random selection) and draw 5 balls from the box—either 4 red and 1 white or 4 white and 1 red—and put them on display. (The experimenter was actually drawing preselected “random samples” from a hidden compartment in the box.) The infants looked longer at the display with the 4 white balls, indicating that they were surprised that the experimenter drew mostly white balls from a box that was mostly filled with red balls. (Later in this chapter, we will further discuss the use of so–called violation–of–expectation paradigms, which use infants' “surprise” at unexpected outcomes to draw inferences about their expectations.) It is important to note that the infants showed no such surprise when it was clear that the displayed balls did not come from the box (as when the experimenter took them from her pocket) or when they could see that the red balls were stuck to the box and could not be removed (Denison & Xu, 2010; Teglas et al., 2007; Teglas et al., 2011; Xu & Denison, 2009). Infants as young as 6 months of age appear to be sensitive to the distribution of elements (here, colors) as a source of information upon which to base future expectations (Denison, Reed, & Xu, 2013). Similar findings are emerging across a number of domains, all suggesting that infants generate inferences about the future based on prior data, in tasks ranging from word learning to social interactions, and that infants can use new experiences to adjust these inferences (e.g., Schulz, 2012; Xu & Kushnir, 2013).
205
review:
Infants begin learning about the world immediately. They habituate to repeatedly encountered stimuli, form expectancies for repeated event sequences, and learn associations between particular sights and sounds that regularly occur together. Classical conditioning, which has been demonstrated in newborn and older infants, is believed to be especially important in the learning of emotional reactions. Infants are highly sensitive to a wide range of contingency relations between their own behavior and what follows it. A particularly powerful form of learning for older infants is observational learning: from 6 months of age on, infants learn many new behaviors simply by watching what other people do. Although an enormous amount of learning goes on during the infancy period, some associations or relations are easier for babies to learn than others are. In observational learning, for example, intentionality is a key factor. Finally, infants are able to use their accumulated experience to make rational predictions about the future.