Chapter 8. Angular velocity, angular acceleration, and angular position for constant angular acceleration only (8-17)
Question
MJ2Hv1fJ1I7QXe933bLYxkXfCqHsBWK4UmkrkXrXceo05rvZDvMfuyPa4L1ky4YoggE4q88nTRMiH3/DQ91mbshg64/UAgV/CMFoLMS9BPJRciSjKbayphw9dpnModOlXxWuO3debFVINyU4FrgWoDai+jpuXLZn
Question
FwgTgqggC03GMc5zBYNikOydbR1TFUaHOb4FIUY+2NLgquZvSQ/yPQqFEfiHYQzmnAF49eEx8Gxskc764zvU9/rRy8jMyqTUAGQ4cD+6Yjk=
Question
R6NVI2/fQ0KohlQ0t/WeafImF1x35FX6BngvkGu5VEbQQVnPESDroW2U/i/P0cozQ9YoqPuB7HdmxjbY
Question
0918K1G5kdl5Vi9VzaHc/2GKi3kEkcEUSla0T2lhfL9K3h4l4DRSRw==
Review
It’s straightforward to write down the equations for rotational motion with constant angular acceleration. To see how, take a look at the equations for linear velocity \(v_x\) and angular velocity \(\omega_z\), and the equations for linear acceleration \(a_x\) and angular acceleration \(\alpha_z\):
| Linear Motion | Rotational Motion | ||
|---|---|---|---|
|
|
(linear velocity) |
|
(angular velocity) |
|
|
(linear acceleration) |
|
(angular acceleration) |
Comparing these equations shows that the rotational quantities \(\theta\), \(\omega_z\), and \(\alpha_z\) are related to each \perpher in exactly the same way that \(x\), \(v_x\), and \(a_x\) are related to each \perpher. So we can take the equations for constant linear acceleration and convert them to the equations for constant angular acceleration by replacing \(x\) with \(\theta\), \(v_x\) with \(\omega_z\), and \(a_x\) with \(\alpha_z\). The equations for linear motion are:
(2-5) \(v_x = v_{0x} + a_xt\) (constant acceleration only)
(2-9) \(x = x_0 + v_{0x}t + \frac{1}{2}a_xt^2\) (constant \(x\) acceleration only)
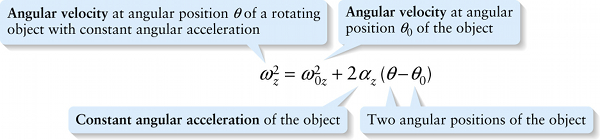
(2-11) \(v_x^2 = v_{0x}^2 + 2a_x(x - x_0)\) (constant \(x\) acceleration only)
Hence, along with equations 8-16 and 8-15, the equation for constant angular acceleration is: