Magnitude of torque in terms of lever arm (8-19)
Question
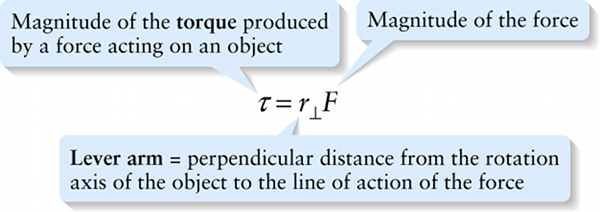
\(\textbf{Lever arm}\)= perpendicular distance from the rotation axis of the object to the line of action of the force
{"title":"Magnitude of the torque produced by a force acting on an object","description":"Incorrect","type":"incorrect","color":"#99CCFF","code":"[{\"shape\":\"poly\",\"coords\":\"82,133\"},{\"shape\":\"rect\",\"coords\":\"4,19,40,53\"}]"} {"title":"Magnitude of the force","description":"Wrong","type":"incorrect","color":"#ffcc00","code":"[{\"shape\":\"rect\",\"coords\":\"118,11,119,13\"},{\"shape\":\"rect\",\"coords\":\"139,8,174,53\"}]"} {"title":"Lever arm = perpendicular distance from the rotation axis of the object to the line of action of the force","description":"Correct!","type":"correct","color":"#333300","code":"[{\"shape\":\"rect\",\"coords\":\"83,12,119,57\"}]"}
Review
Figure 8-19c shows another way to calculate the magnitude of the torque for the situation in Figure 8-19a. As this figure shows, the \(\textbf{line of action}\) of the force is just an extension of the force vector \(\vec{F}\) through the point where the force is applied. The \(\textbf{lever arm}\) of the force (also called the \(\textit{moment arm}\)) is the perpendicular distance from the rotation axis to the line of action of the force, which is why we denote it by the symbol \(r_\perp\) (\(\perp\) is mathematical shorthand for “perpendicular”). Trigonometry shows that the lever arm \(r_\perp\) equals \(r \sin{\phi}\), the same quantity that appears in Equation 8-18. Hence we can rewrite that equation as: