11.4 Learning and Social-Cognitive Theories
ROBOTS CAN LEARN, TOO
 Tank the Roboceptionist is very good at what he does (providing room numbers, directions, weather forecasts, and so on), and he can respond to a range of unexpected remarks and questions in character with his persona. Say “I love you,” and he will shoot back with something like, “That’s nice, but you don’t even know me.” Assault his keyboard with offensive remarks such as “I hate you!” and “@#?! you!” and he will tell you that you are not being very nice. But Tank’s persona and everything he says are predetermined by the human beings who created him. Imagine if Tank could craft his own witty responses from scratch? And wouldn’t it be something if he could learn from his environment and independently develop new skills?
Tank the Roboceptionist is very good at what he does (providing room numbers, directions, weather forecasts, and so on), and he can respond to a range of unexpected remarks and questions in character with his persona. Say “I love you,” and he will shoot back with something like, “That’s nice, but you don’t even know me.” Assault his keyboard with offensive remarks such as “I hate you!” and “@#?! you!” and he will tell you that you are not being very nice. But Tank’s persona and everything he says are predetermined by the human beings who created him. Imagine if Tank could craft his own witty responses from scratch? And wouldn’t it be something if he could learn from his environment and independently develop new skills?
It turns out that robots can “learn” to some degree. For example, researchers have fashioned robots that can take a collection of objects and categorize them according to the sounds they make when shaken, dropped, or manipulated in other ways (Smith, 2009, March 23). HERB (the Home Exploring Robot Butler) can learn to find his way through messy rooms (Srinivasa et al., 2009). There are also robots that demonstrate observational learning, imitating simple human behaviors like head movements and hand gestures. At least one robot learned to play air hockey by observing the movements of a human opponent (Breazeal & Scassellati, 2002). What does this have to do with personality? Hold on, we’re almost there.
One very popular area of robot research is “reinforcement learning,” according to Dr. Simmons. Here’s a hypothetical example of how it might work. Researchers program a robot to have some goal, such as exiting a room. The robot begins the task by randomly moving around (not unlike Thorndike’s cats from Chapter 5), but eventually it will come upon a path that leads to an exit. Upon leaving the room, the robot gets a signal indicating that the behavior should be repeated. With continued reinforcement through signals received for correct behavior, the robot tends to make fewer errors and reaches the exit more quickly. Over time, its average performance improves. But like most robot learning feats accomplished thus far, leaving a room is far from an expression of personality.
CONNECTIONS
In Chapter 5, we described operant conditioning, the type of learning that occurs when we make connections between behaviors and their consequences. The robot’s exiting is followed by a signal, which serves as a reinforcer. But unlike Thorndike’s cats, the robot cannot experience “pleasurable” outcomes. It is programmed to respond to outcomes in a predetermined way.
With improvements in technology and computer programming, is it possible that robots might one day be capable of possessing personality? If you asked a follower of Freud, we suspect the answer would be a forceful “no.” Robots do not have unresolved conflicts from childhood; in fact, they don’t even have childhoods (remember, the story of Tank is just a human invention). A robot cannot dream, feel sexual urges, or repress unwanted thoughts. Ask a strict behaviorist if the robots of the future might be capable of having personality, and you might get a very different answer.
Tank: Dr. Simmons Answers - Is Tank capable of learning new tasks?
The Role of Learning, Thought, and Environment
LO 8 Use learning theories to explain personality development.
Behaviorists like B. F. Skinner were not interested in studying the thoughts and emotions typically thought to be expressions of personality. They focused on measuring observable behaviors that they believed resulted from learning processes such as classical conditioning, operant conditioning, and observational learning. From this perspective, personality is a compilation or collection of behaviors, all of which have been shaped through a lifetime of learning.
Let’s look at an example. Think of a friend or classmate who is very outgoing. A behaviorist would suggest she has been consistently reinforced to act this way. She gets positive attention, perhaps a promotion at work, and is surrounded by many friends, all of which reinforce her outgoing behavior. This characteristic, which psychologists might call “extraversion,” is just one of the many dimensions of personality molded by learning. Now apply the behaviorist principle to robots. Learning is the foundation for personality, and robots are capable of learning. Looking at things from this perspective, it seems plausible that robots could develop rudimentary personalities.
Like any theory of personality, behaviorism is limited. Critics contend that behaviorism essentially ignores anything that is not directly observable and thus portrays humans too simplistically; as passive and unaware of what is going on inside their internal and external environments. Julian Rotter (b. 1916) is one of the early social learning theorists who countered these weaknesses, suggesting that not all aspects of behavior and personality can be directly observed (Rotter, 1990). He proposed several important cognitive aspects of personality, including locus of control and expectancy.
Rotter and Personality
LO 9 Summarize Rotter’s view of personality.
According to Rotter, a key component of personality is locus of control, a pattern of beliefs about where control or responsibility for outcomes resides. If a person has an internal locus of control, she believes that the causes of her life events generally reside within her, and that she has some control over them. For example, such a person would say that her career success depends on how hard she works, not on luck (Rotter, 1966). Someone with an external locus of control believes that causes for outcomes reside outside of him; he assigns great importance to luck, fate, and other features of the environment, over which he has little control. As this person sees it, getting a job occurs when all the circumstances are right and luck is on his side (Rotter, 1966). A person’s locus of control refers to beliefs about the self, not about others.
Rotter also explored how behaviors are influenced by thoughts about the future. Expectancy refers to the predictions we make about the outcomes and consequences of our behaviors (Infographic 11.2). A woman who is considering whether she should confront the manager of a restaurant over a bad meal will decide her next move based on her expectancy: Does she expect to be thrown out the door, or does she believe it will lead to a free meal? In these situations, there is an interaction among expectancies, behaviors, and environmental factors. The reinforcement value of the consequence plays a role (Rotter, 1954). People have different preferences regarding reinforcements. Getting an A on a final exam may have high reinforcement value for you, but another student might consider it more important to win an award for perfect attendance.
Bandura and Personality
LO 10 Discuss how Bandura uses the social-cognitive perspective to explain personality.
Another early critic of the behaviorist approach was Albert Bandura (b. 1925). Bandura rejected the notion that psychologists should only focus on observable behavior, and recognized the importance of cognitions, reinforcers, and environmental factors (Bandura, 2006). This social-cognitive perspective suggests that personality results from patterns of thinking (cognitive) as well as relationships and other factors in the environment (social). Prior experiences have shaped, and will continue to shape, your personality. Cognitive abilities, including knowledge, are partly the result of our interactions with others (Bandura, 1977a, 2006). We don’t spend much time in isolation; in fact, almost everything we do involves some sort of collaboration. We are social creatures who work together and live in family units.
Bandura also pointed to the importance of self-efficacy, which refers to beliefs about our ability and effectiveness in reaching goals (Bandura, 1977b, 2001). People who exhibit high self-efficacy often achieve greater success at work because they are more likely to be flexible and open to new ideas (Bandura, 2006). A person who demonstrates low self-efficacy generally believes he will not succeed in a particular situation, regardless of his abilities or past experience. Beliefs about self-efficacy are influenced by experience and may change across situations. Generally speaking, people who believe they can change and progress are more likely to persevere in difficult situations.
INFOGRAPHIC 11.2: The Social-Cognitive Perspective on Personality
Social-cognitive theorists rejected behaviorists’ exclusive focus on observable behavior. Acknowledging that personality may be shaped through learning, social-cognitive theorists such as Albert Bandura also emphasized the roles of cognitions and environmental influences on behavior. Bandura’s theory of reciprocal determinism shows how cognition, behaviors, and the environment all interact to determine our personality.
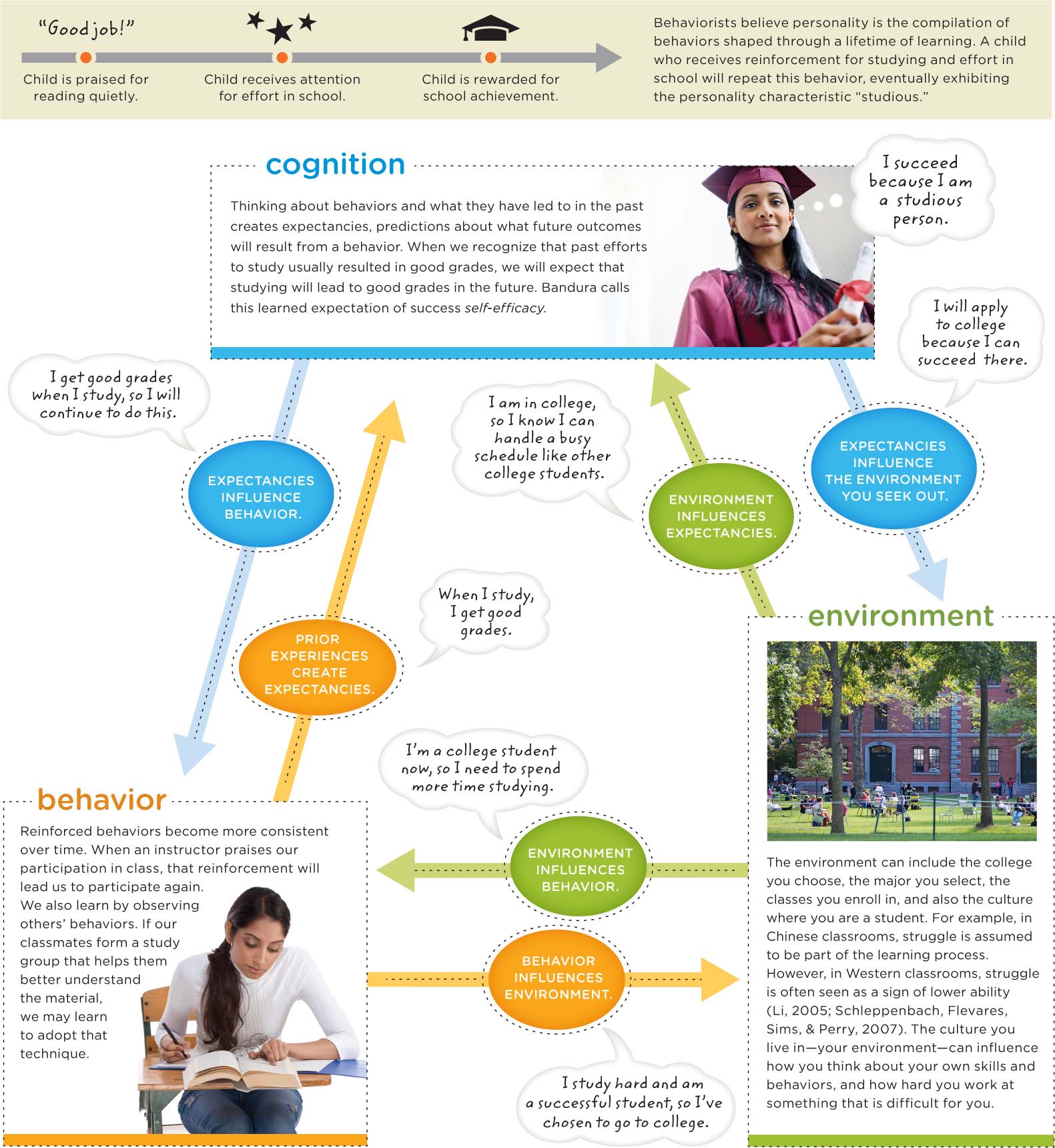
Beliefs play a key role in our ability to make decisions, problem-solve, and deal with life’s challenges. The environment also responds to our behaviors, which in turn are based in part on our beliefs. In essence, we have internal forces (beliefs, expectations) directing our behavior, external forces (reinforcers, punishments) responding to those behaviors, and the behaviors themselves influencing our beliefs and the environment. These three components form a complex system that determines our behavior patterns and personality (Infographic 11.2). Bandura refers to this multidirectional interaction as reciprocal determinism (Bandura, 1978, 1986).

Let’s use an example to see how reciprocal determinism works. A student harbors a certain belief about herself (I am going to graduate with honors). This belief influences her behavior (she studies hard and reaches out to instructors), which affects her environment (instructors take note of her enthusiasm and offer support). Thus, you can see, personality is the result of an ongoing interaction among cognitions, behaviors, and the environment. Bandura’s reciprocal determinism resembles Rotter’s view. Both suggest that personality is shaped by an ongoing interplay of cognitive expectancies, behaviors, and environment.
Taking Stock: An Appraisal of Learning and Social-Cognitive Theories
Tank: Dr. Simmons Answers - How did you decide what personality traits and backstory Tank would have?
The learning and social-cognitive theorists were among the first to realize that we are not just products of our environments, but dynamic agents capable of altering the environment itself. Their focus on research and testable hypotheses is a clear advantage over the psychoanalytic and humanistic theories. Some critics argue that these approaches minimize the importance of unconscious processes and emotional influences (Schultz & Schultz, 2013; Westen, 1990), but overall, the inclusion of cognition and social factors offers valuable new ways to study and understand personality.
So far, our main focus has been understanding the origins of personality. In the next section, we direct our attention away from theories explaining personality and onto those describing it.
show what you know
Question 11.11
1. According to __________, personality is the compilation of behaviors that have been shaped via reinforcement and conditioning.
learning theory
Question 11.12
2. Julian Rotter proposed that personality is influenced by __________, one’s beliefs about where responsibility or control exists.
- reinforcement
- locus of control
- expectancy
- reinforcement value
b. locus of control
Question 11.13
3. Reciprocal determinism represents a complex multidirectional interaction among beliefs, behavior, and environment. Draw a diagram illustrating how reciprocal determinism explains one of your behavior patterns.
Answers will vary, but can be based on the following definition (and see Infographic 11.2). Reciprocal determinism refers to the multidirectional interactions among cognitions, behaviors, and the environment guiding our behavior patterns and personality.