10.1 Rectangular Coordinates in SpacePrinted Page 695
695
OBJECTIVES
When you finish this section, you should be able to:
A two-dimensional rectangular coordinate system is represented by a plane in which every point P corresponds to exactly one ordered pair of real numbers (x,y), the coordinates of P. In space every point P corresponds to exactly one ordered triple of real numbers (x,y,z).
1 Locate Points in SpacePrinted Page 695
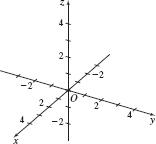
We begin by selecting a fixed point called the origin O. Through the origin, draw three mutually perpendicular number lines, called the coordinate axes. The coordinate axes are usually labeled the x-axis the y-axis and the z-axis. On each axis choose one direction as positive and select an appropriate scale, as shown in Figure 1.
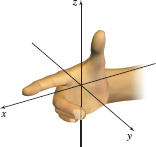
Notice label in Figure 1 that the positive z-axis points upward, the positive y-axis points toward the right, and the positive x-axis points forward. This is known as a right-handed system because it conforms to the right-hand rule. The right-hand rule states: if the index finger of the right hand points in the direction of the positive x-axis and the other fingers point in the direction of the positive y-axis, then the thumb will point in the direction of the positive z-axis, as shown in Figure 2.
NOTE
There is also a left-handed system and a left-handed rule; we use only a right-handed system.
As in the plane, we assign coordinates to each point P in space, but in space we use an ordered triple of real numbers (x,y,z). For example, the point (3,5,7), is the point for which 3 is the x-coordinate, 5 is the y-coordinate, and 7 is the z-coordinate. The point (3,5,7) is plotted by starting at the origin, moving 3 units along the positive x-axis, 5 units in the direction of the positive y-axis, and 7 units in the direction of the positive z-axis. See Figure 3.
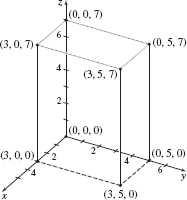
Figure 3 also shows the points (3,0,0), (0,5,0), (0,0,7), (3,5,0), (3,0,7), 0,5,7) and (0,0,0), which form a box with the points (0,0,0) and (3,5,7) as opposite vertices.
NOW WORK
Points of the form (x,0,0) lie on the x-axis, while points of the form (0,y,0) and (0,0,z) lie on the y-axis and z-axis, respectively.
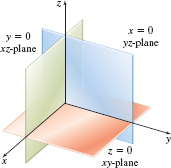
Points of the form (x,y,0) lie on a plane called the xy-plane. The xy-plane is perpendicular to the z-axis and its equation is z=0. This is the plane used in the familiar two-dimensional rectangular coordinate system.
Points of the form (x,0,z) lie on the xz-plane. The xz-plane is perpendicular to the y-axis, and its equation is y=0. Finally, points of the form (0,y,z) lie on the yz-plane, which is perpendicular to the x-axis, and its equation is x=0. Collectively, these three planes are referred to as coordinate planes. See Figure 4.
696
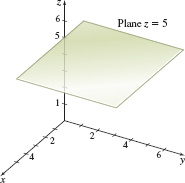
In general, for any real number k, the graph of x=k is a plane parallel to the yz-plane; the graph of y=k is a plane parallel to the xz-plane; and the graph of z=k is a plane parallel to the xy-plane. As shown in Figure 5, the graph of the equation z=5 is a plane parallel to and 5 units above the xy-plane.


NEED TO REVIEW?
The distance formula appears in Appendix A.3, p. A-16.
NOW WORK
2 Find the Distance Between Two Points in SpacePrinted Page 696
The formula for the distance between two points in space is an extension of the distance formula in the plane.
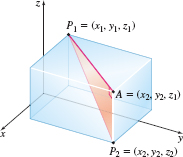
To find the distance |P1 P2| between two points P1=(x1,y1,z1) and P2=(x2,y2,z2), we use the Pythagorean Theorem twice. Figure 6 shows the points P1 and P2 and a third point A=(x2,y2,z1). The first application of the Pythagorean Theorem involves observing that the triangle P1 A P2 is a right triangle where the side of length |P1 P2| is the hypotenuse. As a result, |P1 P2|=√|P1 A|2+|A P2|2Pythagorean Theorem
The points P1 and A lie in a plane parallel to the xy-plane. Do you see why? To find |P1 A|, we use the distance formula in the plane: |P1A|=√(x2−x1)2+(y2−y1)2
The points P2 and A lie on a line parallel to the z-axis, so that |A P2|=|z2−z1| and |A P2|2=(z2−z1)2. Combining these results, we obtain a formula for the distance between two points in space.
THEOREM Distance Formula in Space
The distance between two points P1=(x1,y1,z1) and P2=(x2,y2,z2) in space, denoted by |P1 P2|, is \bbox[5px, border:1px solid black, #F9F7ED]{ \left\vert P_{1}~P_{2}\right\vert =\sqrt{ (x_{2}-x_{1})^{2}+(y_{2}-y_{1})^{2}+(z_{2}-z_{1})^{2}}}
EXAMPLE 1Finding the Distance Between Two Points in Space
Find the distance between P_{1}=(1, 3,-2) and P_{2}=(2,-1,-3).
Solution |P_{1}~P_{2}|=\sqrt{(2-1)^{2}+(-1-3)^{2}+(-3+2)^{2}}= \sqrt{1+16+1}=\sqrt{18}=3\sqrt{2}\qquad
NOW WORK
3 Find the Equation of a SpherePrinted Page 697
697
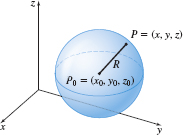
The collection of all points in space that are a fixed distance R from a fixed point P_{0}=( x_{0},y_{0},z_{0}) is called a sphere. See Figure 7. The fixed distance R is called the radius, and the fixed point P_{0} is called the center of the sphere. The distance from any point P=(x, y, z) on a sphere of radius R to the center point P_{0}=(x_{0},y_{0},z_{0}) is \vert PP_{0}\vert=R. The Distance Formula in space shows that \begin{equation*} \vert P\!P_{0}\vert =\sqrt{ (x-x_{0})^{2}+(y-y_{0})^{2}+(z-z_{0})^{2}}=R \end{equation*}
Squaring both sides gives the standard form of the equation of a sphere.
THEOREM Standard Form of the Equation of a Sphere
The equation of a sphere with center at the point P_{0}=(x_{0},y_{0},z_{0}) and radius R is \bbox[5px, border:1px solid black, #F9F7ED]{ (x-x_{0})^{2}+(y-y_{0})^{2}+(z-z_{0})^{2}=R^{2}}

EXAMPLE 2Finding the Equation of a Sphere
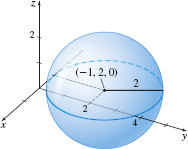
The standard form of the equation of the sphere shown in Figure 8, with radius 2 and center at (-1, 2, 0), is \begin{equation*} (x+1)^{2}+(y-2)^{2}+z^{2}=4 \end{equation*}
NOW WORK
EXAMPLE 3Finding the Center and Radius of a Sphere
Show that { x^{2}+y^{2}+z^{2}+2x+4y-2z=10 }
is the equation of a sphere. Find its center and radius.
Solution We begin by writing the equation as \begin{equation*} (x^{2}+2x)+(y^{2}+4y)+(z^{2}-2z)=10 \end{equation*}
NEED TO REVIEW?
Completing the square is discussed in Appendix A.1, pp. A-2 to A-3.
and then we complete the square three times. The result is \begin{eqnarray*} (x^{2}+2x+1)+(y^{2}+4y+4)+(z^{2}-2z+1) &=&10+1+4+1 \\[4pt] (x+1)^{2}+(y+2)^{2}+(z-1)^{2} &=&16 \end{eqnarray*}
This is the equation of a sphere with radius 4 and center at (-1,-2, 1).